Робот может совершать равные по длине шаги по дорожке вперед и назад, при этом выбор направления движения каждого шага является случайным и равновозможным. Робот сделал 10 шагов и остановился. Найти вероятность того, что он окажется на расстоянии более двух шагов от начала движения.
Решение. Если шагов всего один, то робот может остановиться в двух положениях, условно изображенных на рисунке.

Здесь 0 — начало движения, −1 — шаг назад, 1 — шаг вперед. Вероятность попасть в положения −1 и 1 одинаковая и равна  Если шагов два, то существует три возможных положения робота в конце движения, условно обозначенных на рисунке.
Если шагов два, то существует три возможных положения робота в конце движения, условно обозначенных на рисунке.
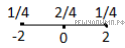
В положение −2 можно попасть из положения −1 после первого шага, совершив шаг назад. Таким образом, вероятность попадания в положение −2 за два шага равна  В положение 0 можно попасть из положений −1 и 1 после первого шага, совершив шаги вперед и назад соответственно. Тогда вероятность попадания в положение 0 после двух шагов равна
В положение 0 можно попасть из положений −1 и 1 после первого шага, совершив шаги вперед и назад соответственно. Тогда вероятность попадания в положение 0 после двух шагов равна

В положение 2 после второго шага возможно попасть только из положения 1, делая один шаг вперед. Вероятность попадания в 2 за два шага равна 
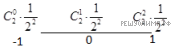
Далее образование коэффициентов при степенях  определяется треугольником Паскаля. Предположим, что робот сделал до остановки k шагов. Тогда существует
определяется треугольником Паскаля. Предположим, что робот сделал до остановки k шагов. Тогда существует  возможных положений, в которых он может остановиться. Крайние из них находятся на расстоянии k шагов от начального положения движения. Расстояние между соседними положениями равно двум шагам. На рис. изображены эти положения для четных и нечетных k.
возможных положений, в которых он может остановиться. Крайние из них находятся на расстоянии k шагов от начального положения движения. Расстояние между соседними положениями равно двум шагам. На рис. изображены эти положения для четных и нечетных k.
Для  вероятность остановки в положении равна
вероятность остановки в положении равна  в положении
в положении  (на расстоянии 2 шага от начала движения) эта вероятность равна
(на расстоянии 2 шага от начала движения) эта вероятность равна  в положение
в положение  (на расстоянии 4 шага от начального положения)
(на расстоянии 4 шага от начального положения)  и т. д. в положении
и т. д. в положении  эта вероятность равна
эта вероятность равна  В варианте
В варианте  Вероятность остановится в положении, отстоящем от начального не более двух шагов, равна
Вероятность остановится в положении, отстоящем от начального не более двух шагов, равна

а вероятность противоположного события  Для
Для  вероятность остановки в положении
вероятность остановки в положении  равна в положении
равна в положении  (на расстоянии 3 шага от начала движения) — и т. д. остановка в положении
(на расстоянии 3 шага от начала движения) — и т. д. остановка в положении  происходит с вероятностью
происходит с вероятностью 
Ответ: 
Ответ: 


 где b — цифра единиц. Тогда по условию
где b — цифра единиц. Тогда по условию  Откуда
Откуда  или
или  Так как b — цифра, то отсюда следует, что единственным искомым числом является 18.
Так как b — цифра, то отсюда следует, что единственным искомым числом является 18.
 то
то  при любых a, b . Поэтому
при любых a, b . Поэтому 
 что и требовалось доказать.
что и требовалось доказать. На стороне AB вне треугольника построен квадрат с центром O. Найдите OC, если
На стороне AB вне треугольника построен квадрат с центром O. Найдите OC, если 
 значит,
значит, 
 квадрата, то есть его центром. Тогда OC — радиус этой окружности. Таким образом,
квадрата, то есть его центром. Тогда OC — радиус этой окружности. Таким образом, 

 Докажите, что число
Докажите, что число  является точным квадратом.
является точным квадратом. следует, что
следует, что 

 Тогда
Тогда 





 также является целым, что и требовалось.
также является целым, что и требовалось.
 и
и  могут быть тремя последовательными членами геометрической прогрессии.
могут быть тремя последовательными членами геометрической прогрессии.



 то все члены прогрессии нулевые. Случай
то все члены прогрессии нулевые. Случай 





 системы
системы  в прямоугольнике
в прямоугольнике  и
и 




 неравенства (*) и (**) ограничивают параллелограмм, внутри которого только две точки
неравенства (*) и (**) ограничивают параллелограмм, внутри которого только две точки  и
и  с целочисленными координатами. Им соответствуют решения
с целочисленными координатами. Им соответствуют решения 


 длины 5 двигается на координатной плоскости так, что его концы лежат на параболе
длины 5 двигается на координатной плоскости так, что его концы лежат на параболе  Точка M — середина отрезка
Точка M — середина отрезка  Найти минимально возможное значение расстояния точки M до оси абсцисс, а также абсциссу точки M, при которой оно достигается.
Найти минимально возможное значение расстояния точки M до оси абсцисс, а также абсциссу точки M, при которой оно достигается.









 из равенства, получаем:
из равенства, получаем:

 Преобразуем выражение (**):
Преобразуем выражение (**): 
 Тогда расстояние точки M до оси абсцисс равно
Тогда расстояние точки M до оси абсцисс равно 




 то минимальное расстояние равно
то минимальное расстояние равно 

 то с учетом роста функции
то с учетом роста функции  на полуоси
на полуоси  и принимает минимальное значение
и принимает минимальное значение  с учетом ограничения
с учетом ограничения  при
при  для
для 

 для
для  при
при  для
для 
 где t — целое число на интервале
где t — целое число на интервале  обозначим через
обозначим через  Заметим, что
Заметим, что 
 для допустимых значений
для допустимых значений  и
и 
 Общее число кодов равно
Общее число кодов равно  Тогда
Тогда 

 удовлетворяющими второму уравнению системы, является границей квадрата с центром в начале координат и сторонами, параллельными координатным осям рис. 1. Множество точек, координаты которых удовлетворяют второму уравнению системы, является границей квадрата ABOD рис. 2 с диагональю длины
удовлетворяющими второму уравнению системы, является границей квадрата с центром в начале координат и сторонами, параллельными координатным осям рис. 1. Множество точек, координаты которых удовлетворяют второму уравнению системы, является границей квадрата ABOD рис. 2 с диагональю длины  Координаты его вершин
Координаты его вершин 





 находятся внутри большого:
находятся внутри большого: 




 система решений не имеет. При увеличении a на число кратное
система решений не имеет. При увеличении a на число кратное  картина повторяется, Итак, система имеет единственное решение при
картина повторяется, Итак, система имеет единственное решение при 

 или в другой форме записи
или в другой форме записи 


 где N, M — середины сторон основания,
где N, M — середины сторон основания, 








 :
: 

 —
— уравнение для R:
уравнение для R:









 приводит к кубическому уравнению
приводит к кубическому уравнению 


 Им соответствуют три решения:
Им соответствуют три решения: 

 На интервале
На интервале  справедливо неравенства
справедливо неравенства  выполнено неравенство
выполнено неравенство 






 (ОДЗ),
(ОДЗ), 


 где [a] — целая часть числа a — наибольшее целое число не
где [a] — целая часть числа a — наибольшее целое число не 
 Тогда
Тогда 




 имеет решения на отрезке
имеет решения на отрезке 

 Замена
Замена  приводит к задаче нахождения области значений функции
приводит к задаче нахождения области значений функции 
 Исследование функции: Производная
Исследование функции: Производная 
 поэтому
поэтому 


 Найти двугранный угол при основании пирамиды, если известно, что в усеченную пирамиду с плоскостями оснований P и Q можно вписать шар.
Найти двугранный угол при основании пирамиды, если известно, что в усеченную пирамиду с плоскостями оснований P и Q можно вписать шар. и
и  Тогда
Тогда  с коэффициентом подобия q и
с коэффициентом подобия q и  с коэффициентом подобия
с коэффициентом подобия  По условию, в усеченную пирамиду можно вписать шар, а значит, в трапецию mnрk можно вписать окружность. Так как образом при преобразовании подобия с центром в точке S и коэффициентом подобия q отрезка mp является отрезок nk, а отрезок
По условию, в усеченную пирамиду можно вписать шар, а значит, в трапецию mnрk можно вписать окружность. Так как образом при преобразовании подобия с центром в точке S и коэффициентом подобия q отрезка mp является отрезок nk, а отрезок  переходит в отрезок EF, то окружность радиуса r с центром в точке w переходит в окружность радиуса
переходит в отрезок EF, то окружность радиуса r с центром в точке w переходит в окружность радиуса  с центром в точке O, вписанную в трапецию EnkF. Аналогично, окружность с центром в точке w является образом окружности радиуса ρ, вписанной в треугольник Smp. Из подобия треугольников OTS и FzS имеем
с центром в точке O, вписанную в трапецию EnkF. Аналогично, окружность с центром в точке w является образом окружности радиуса ρ, вписанной в треугольник Smp. Из подобия треугольников OTS и FzS имеем 
 Если
Если  то
то 





 удовлетворяют соотношению
удовлетворяют соотношению 
 для любых n и целом a. При каких a число 637 является членом последовательности?
для любых n и целом a. При каких a число 637 является членом последовательности?








 может быть целым для
может быть целым для  то есть существует восемь таких значений
то есть существует восемь таких значений  для
для 













 и
и 
 и
и 
 и
и  причем на них достигается наибольшее значение функции y(x),
причем на них достигается наибольшее значение функции y(x), 





 и
и  Если
Если  то оно имеет по крайней мере один простой делитель p:
то оно имеет по крайней мере один простой делитель p:  и
и  Тогда общее число различных делителей числа a не меньше
Тогда общее число различных делителей числа a не меньше 
 и общее число делителей числа a равно
и общее число делителей числа a равно 

